Aluminum Machining Robot
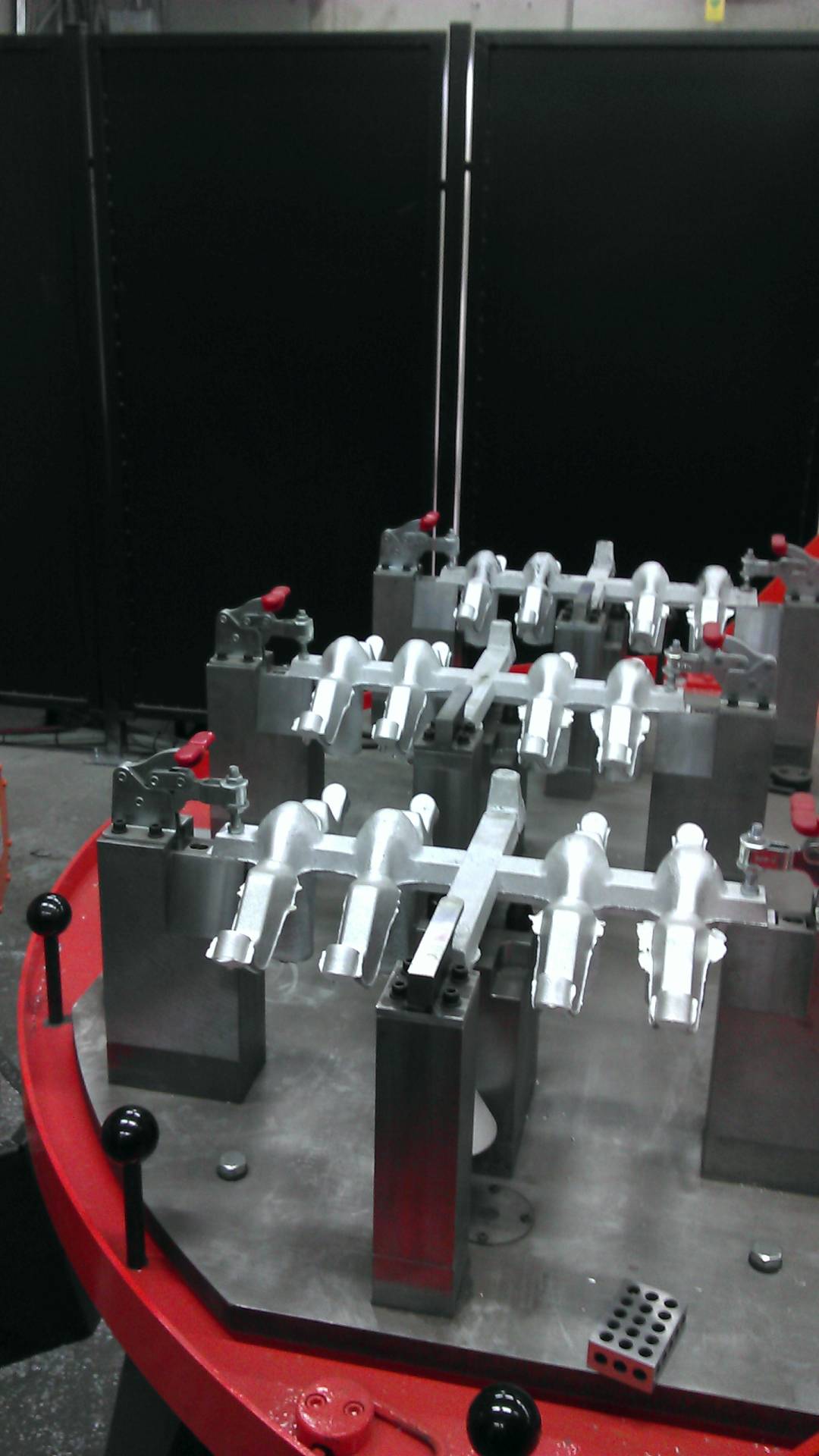
Designed a robotic cell capable of automatic tool changing from an end mill to a circular saw in order to deburr a casting and then cut it from its support array.
Overview
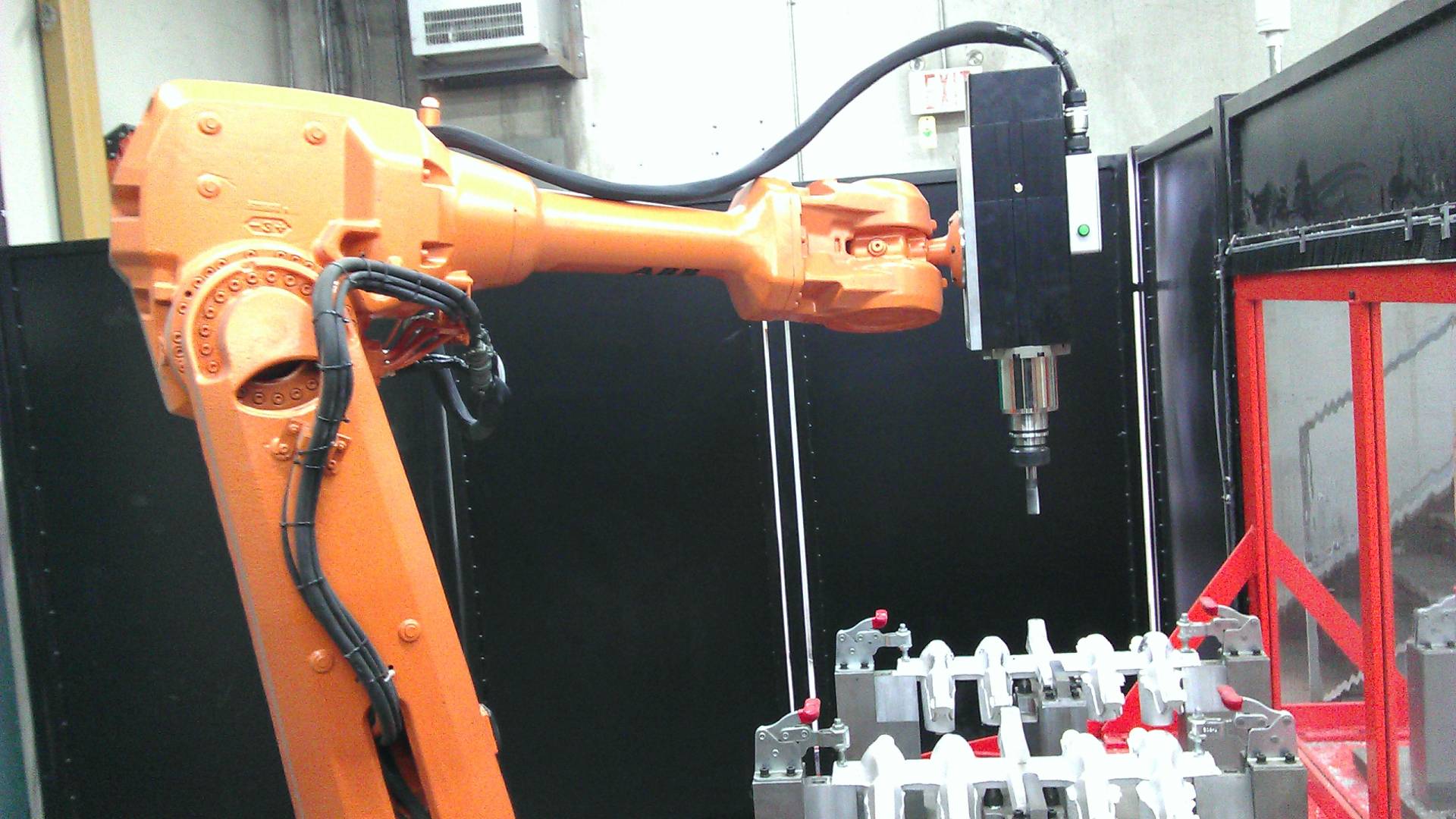
The objective of this project was to design, build, install, and program an aluminum deburring and cutting robotic cell. The goal was to reduce the customers time per part to manufacture. The robot required a spindle capable of automatic tool changing of tools large enough to perform the necessary function. A large 11.5 horsepower spindle was used that had an automatic tool changing capability for HSK-63F type tool holders. The cell had to be designed with safety in mind and follows the CSA standard Z-434-03.My main responsibilities were to design a panel to house a VFD and any other electronics needed for safety interlocks or control, assist in mechanical design related to the fixturing of the parts, install the electrical system, program the robot, and teach the customer how to use it.
Results
As the project is currently ongoing these results are subject to change. In current tests the parts are completed in under 20 seconds from the customers previous 3 minutes. Speeding up their process by almost an order of magnitude.
Designed a system capable of tool changing and with enough horsepower to cut and deburr the parts reliably
Designed with CSA code Z434-03 in mind
Programmed a complex 3d cutting path
Developed full schematics of the system
Job
Williams and White
Category
- Industrial Design
- Industrial Robotics
- Industrial Electronics
- Industrial Safety
- ABB Robot Programming
- Machining
- Prototyping
Pictures