Autonomous Competition Robot
This project was to produce a robot capable of autonomously playing a scaled up version of the board game Operation.
Overview
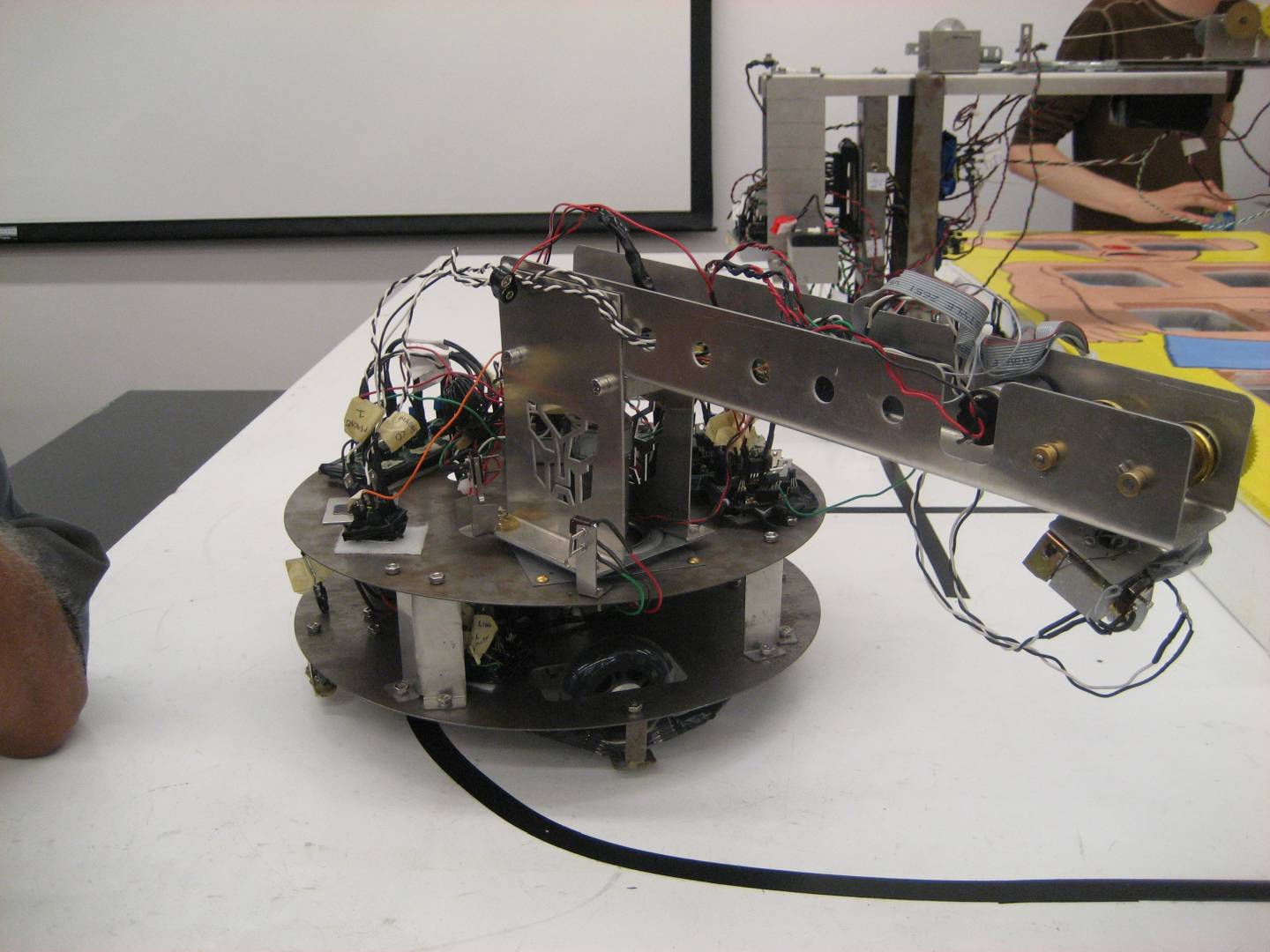
The objective of the project was to create a robot that was capable of playing a scaled up version of the board game Operation. It involved following lines of tape along a playing surface using infrared detectors and emitters, maneuvering the robot to various orientations and positions along the tape and controlling an arm to swing out and pick up the game pieces. The competition involved picking up several pieces as fast as possible while also making sure to skip one of the pieces which emitted a specific frequency of infrared light. Points were deducted for picking up the wrong piece or attempting and failing to pick a piece up.
This project was done with a group of four people in our Physics 253 class and upon completion we performed in a competition at the end of a six week design phase and a seven week building phase.
Results
Assembled the robot using several h-bridges, infrared sensors and power circuitry.
Programmed a state machine to handle the playing of the game and used a PID control loop to keep the sensors from leaving the tape lines.
Collected the game pieces using a rotating arm with a pulley system lowering and raising an electromagnet.
Maneuvered around the game playing surface perfectly during the competition but suffered some issues with the pulley system.
Controlled the motors, arm and pulley using a HandyBoard microcontroller.
School
University of British Columbia
Category
- Embedded Software
- Robotics
- Mechanical Design
- UBC Engineering Physics
- Electronics
- Prototyping
Pictures

Driving around track
Watch Video
Robot going crazy
Watch Video
Arm Movement
Watch Video
Robot Competition physics 253
Watch Video