Balloon-Assisted Quadrotor Robot
Designed and built an augmentation to the X-UFO hobby aircraft to facilitate surveillance, automatic control and longer flight time.
Overview
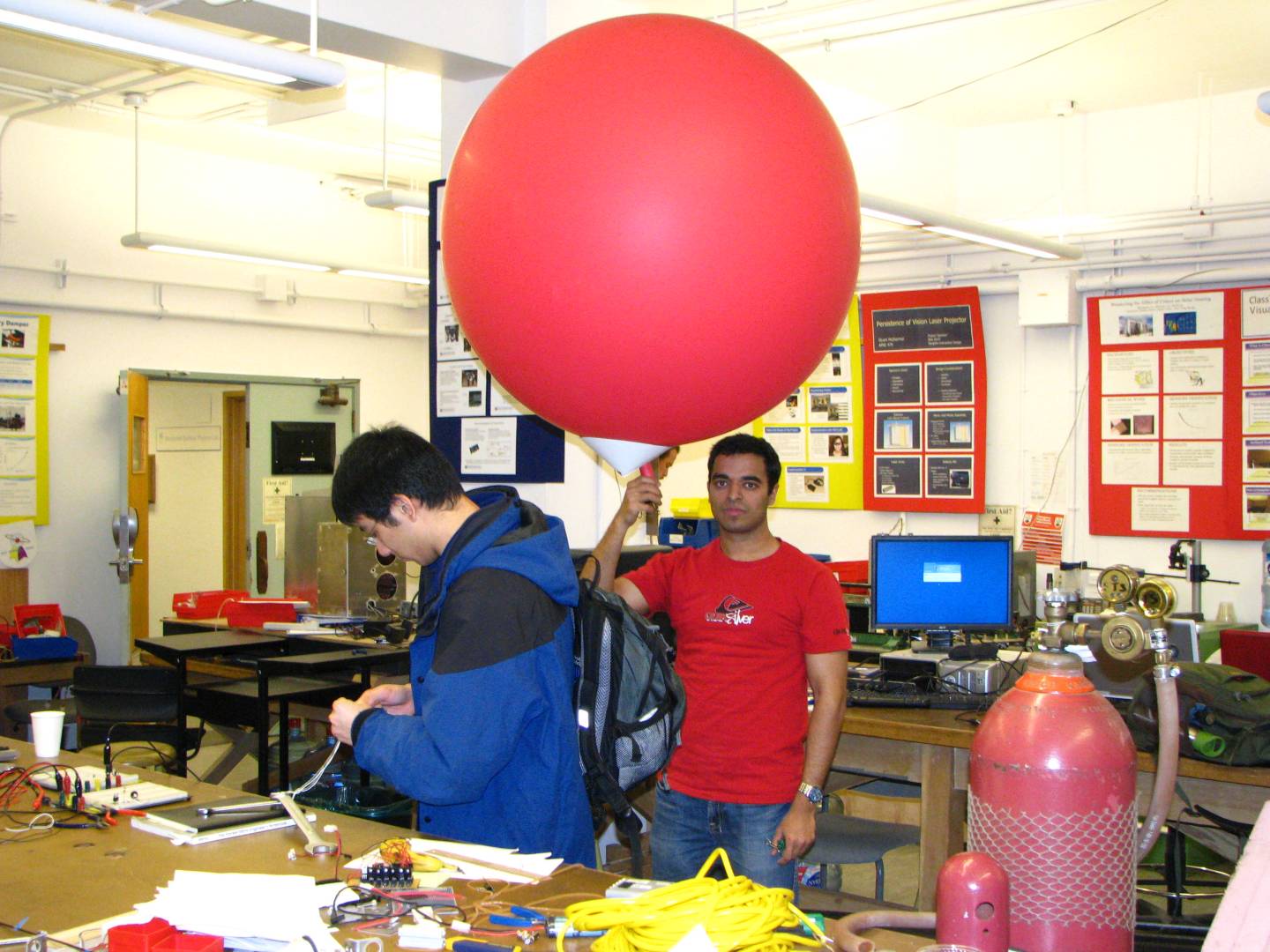
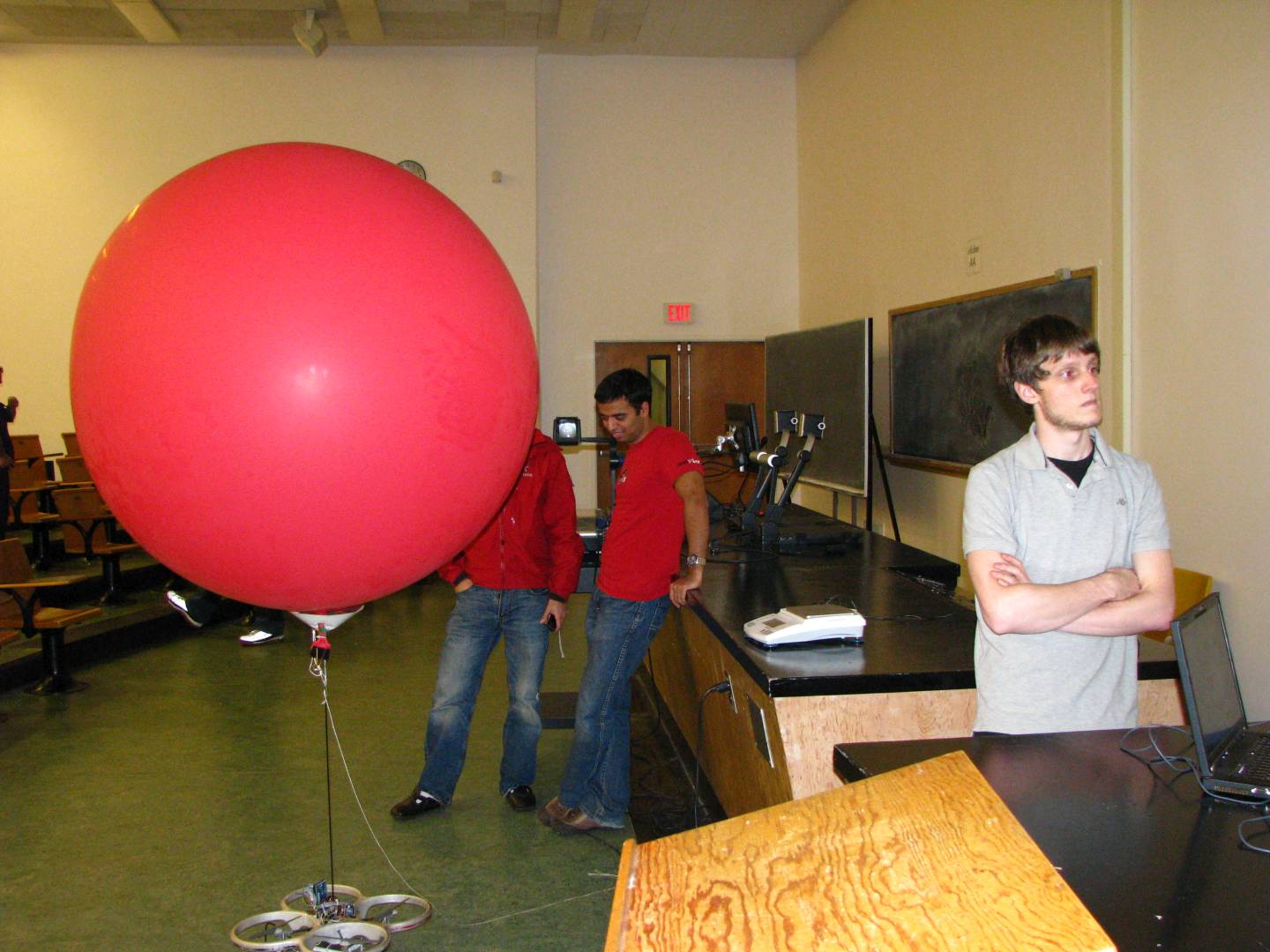
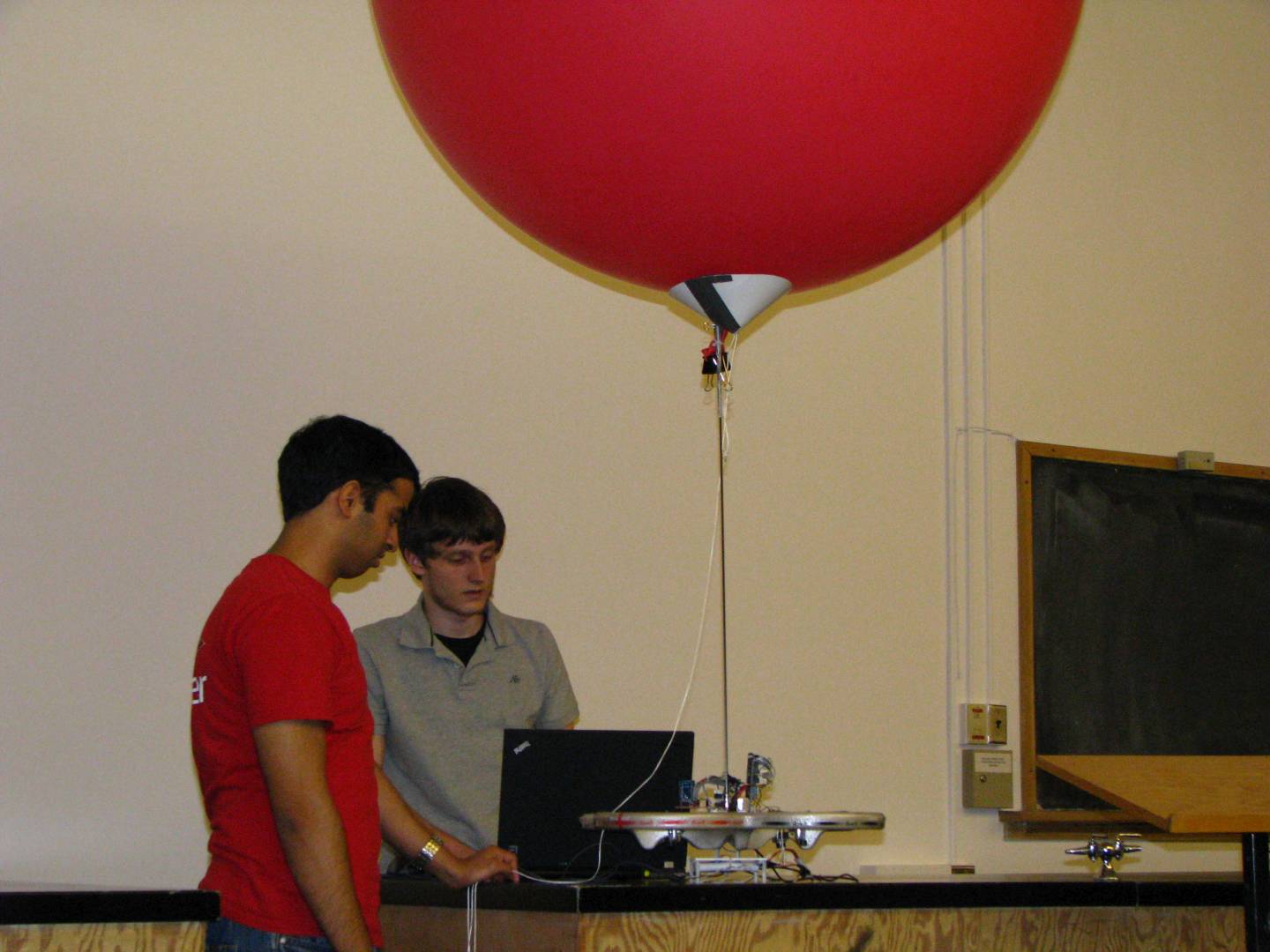
This project was to take an ordinary hobby aircraft and convert it into a surveillance platform with an extended battery life and camera. The project required the platform to self stabilize using control algorithms which read values from the following set of sensors: magnetometer, accelerometer, gyroscopic sensor, ultrasonic sensor. I was the technical manager in a group of three. My duties involved developing the software, designing the circuitry and testing the device. We first stabilized the robot without any attached balloon to simulate using a ball joint or string attachment to the balloon. This involved correcting for yaw, pitch and roll adjustments as well as monitoring height using an ultrasonic sensor. After this was achieved we attached the balloon and found that pitch and roll were passively stable. This allowed us to spend more processor time on the ultrasonic sensor which had a fairly noisy output.
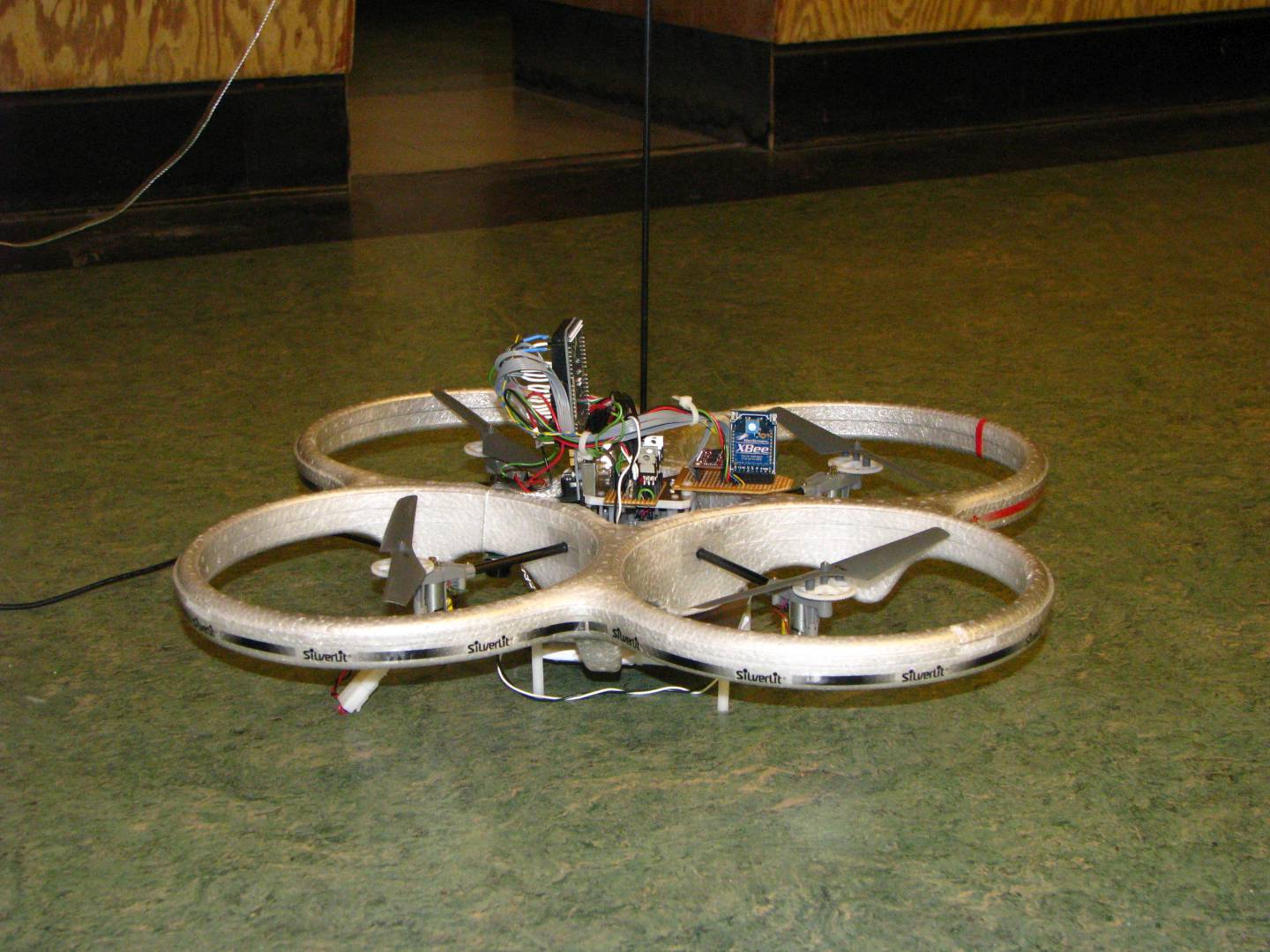
The actual device consists of the original X-UFO hobby aircraft without its off the shelf electronics, our own custom electronics that we chose and ordered, a large 4.5 foot balloon and some extra mounting structure that was attached to the original frame. The electronics that were chosen needed to be as small as possible and preferably light weight. We chose a very compact IMU unit that measured six degrees of freedom ( x,y,z acceleration and also x,y,z rotation velocities ). A magnetometer and ultrasonic sensor were also used to measure magnetic heading and height respectively. We also used an XBee communication module to send commands and status information to a nearby laptop for testing purposes. The original motors and rotors were used and it was fairly trivial to pick apart the circuitry and control the motors using our own quarter h-bridge circuit. The brains of the unit was an Arduino Mega that ran several PID loops and decided on pulse width modulated motor output values to keep the entire unit stable and level in the air.
The project was for the course APSC 479, was completed in 4 months and was sponsored by Bernhard Zender.
Results
Designed, built and integrated the communication, sensor, power and motor circuitry
Programmed several PID loops to stabilize the quadrotor
Found that the flight time would be significantly increased due to the addition of the balloon
Filtered noisy sensor readings into reliable values
School
University of British Columbia
Category
- Embedded Software
- Robotics
- Mechanical Design
- UBC Engineering Physics
- Electronics
- Prototyping
Pictures






Altitude Control Final Tests Watch Video

Altitude Control Final Tests Watch Video

Altitude Control Final Tests Watch Video
Showing some bugs/large oscillation Watch Video

Showing some bugs/large oscillation Watch Video

Balloon Tests Without Altitude Control Watch Video

Balloon Tests Without Altitude Control Watch Video

Balloon Tests Without Altitude Control Watch Video

Balloon Tests Without Altitude Control Watch Video

Close Up of Final Design and Set up video Watch Video

Close Up of Final Design and Set up video Watch Video

Stable Flying on test harness Watch Video

Stable Flying on test harness Watch Video

Starting to Fly but Unstable on test harness Watch Video

Starting to Fly but Unstable on test harness Watch Video

Early Stages Watch Video

Early Stages Watch Video

Early Stages Watch Video
